28.04.2025
Data-driven efficiency, productivity and competitiveness
Passing IMU navigation data to server
Casessa on tutkittu erilaisten antureiden hyödyntämistä sisätiloissa liikkumisen ja navigoimisen toteuttamiseksi.
Viimeisimpänä on toteutettu langaton datayhteys navigointidataa keräävästä yksiköstä (Nano Sense BLE 33) palvelinyksikköön, jota hoitaa demossa Raspberry Pi:hin toteutettu bluetooth server -ohjelmisto. Palvelin ottaa yhteyden Nano Sense BLE 33:hen ja lukee sen tarjoamia telemetriatietoja inertiayksikön(IMU) sensoreista.
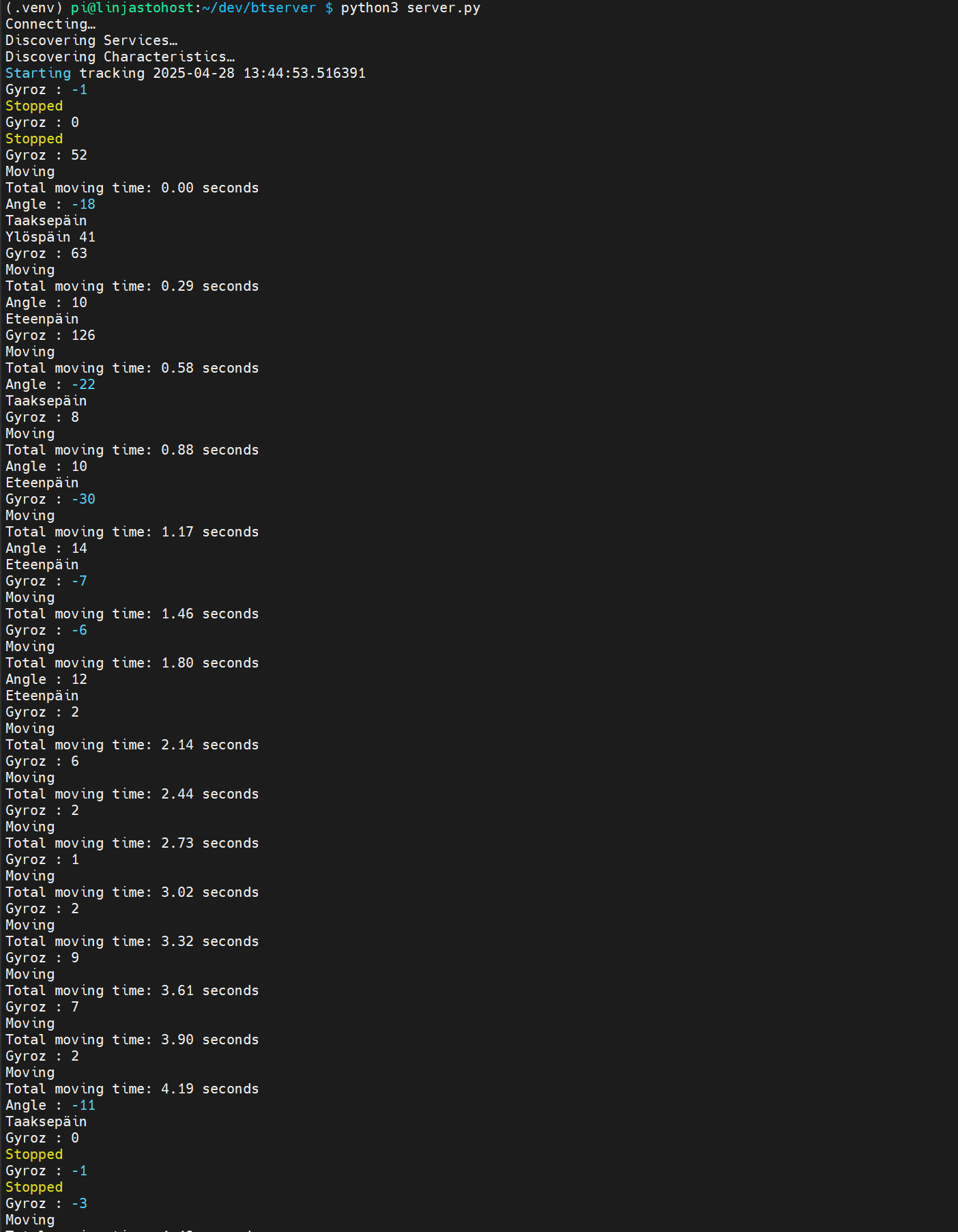
Palvelinpuolen ohjelmiston suoritusta.
-Nano BLE muodostaa eri mittaussuureistaan bluetooth ominaisuuksia, tai tietopisteitä, joita voidaan radioteitse lähettää yhteyden muodostaviin laitteisiin. Aina kun bluetooth tietopisteen arvo muuttuu, palvelinlaite vastaanottaa tiedon.
- Nano BLE:llä voidaan laskea liukuvia keskiarvoja IMU:n datasta ja lähettää nämä palvelimelle.
- Raspberry tulkitsee tiedot ja kerää tietoa Nano BLE:n liikkeistä.
- Demossa on vastaanotettu eteen- ja taaksepäin liikkumista, käännöstietoja, pysähtyminen sekä ylös- ja alaspäin nouseminen.
Järjestelmää on testattu Kokkolan yliopistokeskus Chydeniuksen testilaboratoriossa.
News related cases
IoT sensor devices in data-driven process optimization

