01.04.2025
Datasta tehokkuutta, tuottavuutta ja kilpailukykyä
Sensoridatan hyödyntäminen navigoinnissa
Casessa on tutkittu erilaisten antureiden hyödyntämistä sisätiloissa liikkumisen ja navigoimisen toteuttamiseksi. Järjestelmää, joka hyödyntää esim. gyroskooppia, kiihtyvyysanturia ja magnetometriä määrittääkseen kohteen sijainnin, nopeuden ja suunnan ilman ulkoisia viitteitä, kuten GPS-signaaeja, kutsutaan yleisesti inertianavigointijärjestelmiksi. Casessa on selvitetty inertianavigointijärjestelmän toteuttamiskelpoisuutta pienillä IoT-laitteilla.
INS järjestelmillä on yleisesti tunnistettuja rajoitteita:
1. Koska INS pohjautuu jatkuviin mittauksiin kiihtyvyysanturilta ja gyroskoopilta, ajan kuluessa pienet virheet näissä mittauksissa kumuloituvat, ja sijainti "ajautuu" vähitellen ns metsään.
2. Alkukalibrointi on erittäin tärkeää saada mahdollisimman tarkaksi, koska kaikki myöhemmät sijainnin määritykset perustuvat siihen.
3. Suuri herkkyys ulkoiselle tärähtelylle ja iskuille.
4. Kehitys ja ylläpito kallista.
5. Ilman ulkoista referenssipaikannusta (esim. gps), paikannustarkkuus huononee ajan myötä, tehden siitä vähemmän houkuttelevan vaihtoehdon pitkän ajan paikannustarpeisiin.
Testisensorilevynä casessa on käytetty Arduino Nano BLE sense Rev 2. -laitetta. Se sisältää useita inertianavigointiin tarvittavia antureita, kuten kiihtyvyysanturin, gyroskoopin ja magnetometrin. Lisäksi siinä on bluetooth langattoman yhteyden muodostamiseen.
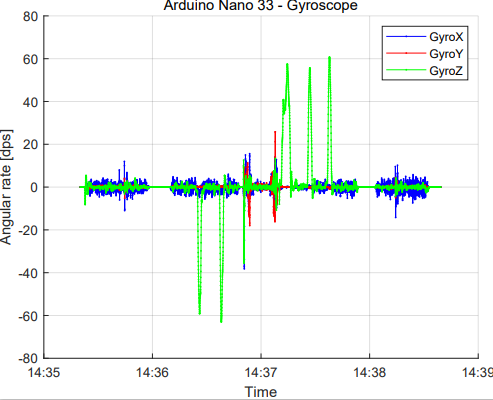
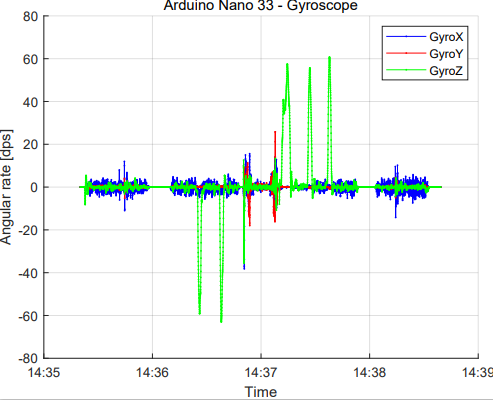
Levyn inertiasensorit tuottavat dataa useita satoja mittauksia sekunnissa. Haasteeksi muodostuu datan käsittely sen muuntamiseksi esim. suunnan ja paikannuksen määrityksiksi. Datan käsittelyn jälkeen tieto voidaan kerätä gateway-laitteeseen esim. visualisoitavaksi.
Uutiseen liityvät caset
IoT-sensorilaitteet dataperusteisessa prosessin optimoinnissa

